Члены команды, участвующие в программе «Воздушные роботы» (Berkeley Aerial Robot (BEAR)), уже провели ряд успешных полевых испытаний с вертолетами, весящими около 58 кг, которые способны не только осуществлять полностью автономные полеты, но и избегать столкновений с объектами, попадающимися им на пути.
Дэвид Шим (David Shim), инженер-исследователь университета, утверждает, что их команда «была первой, кто смог разработать систему, где автономные вертолеты могут обнаруживать препятствия, как неподвижные, так и движущиеся, и производить перерасчет траектории в режиме реального времени, чтобы достигнуть изначальной цели».
Эти исследования – шаг на пути к созданию роботизированных вертолетов, которые смогут летать по городским улицам или через лесные массивы.
В основе технологии распознавания и автоматического обхода препятствий лежит так называемая нелинейная модель предсказательного управления (nonlinear model predictive control (MPC)). Эта технология, при использовании соответствующих датчиков, применима как к пилотируемым, так и беспилотным вертолетам, утверждают исследователи. Они надеются, что в будущем она поможет уменьшить количество столкновений самолетов и спасать жизни людей.
Кроме того, такие роботы могут участвовать в поисковых и спасательских операциях, проводить инспектирование линий электропередач; переносить приборов тепловидения, используемых в сельском хозяйстве и т.д.
В одном из недавно проведенных полевых испытаний разработчики заранее запрограммировали траекторию полета вертолета, которая проходила через тенты высотой 3 м, расположенных сеткой 2х3 и имитирующих городскую улицу. По условиям первого эксперимента, тенты входили в траекторию полета, но вычислительная система вертолета должна была самостоятельно рассчитать, как избежать их.
В более сложном втором эксперименте местоположение тентов не было указано, так что сначала вертолет, с помощью лазерного сканера, создающего трехмерные изображения, должен был обнаружить эти препятствия, а затем изменить курс таким образом, чтобы не врезаться в них.
Результаты экспериментов более чем удовлетворительны: вертолеты ни разу не отклонились от рассчитанного пути более чем на 30 см.
«В реальном мире основная проблема с загрузкой предварительного рассчитанной траектории в компьютер самолета, основы программы автопилота, заключается в том, что на низких высотах информация меняется, - говорит Шэнкер Сэстри (Shankar Sastry), профессор Калифорнийского университета. – Карта или географическая информация, которая используется при составлении программы, может измениться из-за того, что было построено новое здание или произошло какое-нибудь другое событие такого рода. Мы разрабатываем систему, которая будет реагировать на такие изменения без человеческого вмешательства».
Беспилотные летательные аппараты (Unmanned aerial vehicles (UAV)) в настоящее время ограничены такими высотами, где шансы того, что самолет врежется в дерево, здание или другой самолет, весьма невелики или вовсе отсутствуют. Бесплотные винтокрылые летательные аппараты интересны, в частности, тем, что обладают большей маневренностью по сравнению с воздушными суднами с неподвижным крылом. Вертолеты могут парить, взлетать и садиться вертикально, поэтому они могут функционировать в сильно застроенных или густо заросших местностях.
«Беспилотные летательные аппараты с неподвижным крылом допускают использование менее точных управляющих алгоритмов, так как, если что-то случается, то в течение некоторого времени они могут планировать, - говорит Сэстри. – Напротив, вертолеты по сути своей неустойчивы, поэтому входные данные должны быть точными, и они должны поступать очень быстро, чтобы предотвратить падение вертолета».
Кроме вышеописанного эксперимента, исследователи провели также испытания с двумя вертолетами, летящими друг навстречу другу. Тест продемонстрировал способность автономных вертолетов взаимодействовать друг с другом. Во время полета вертолеты регулярно посылали сигналы на компьютер наземной станции, указывая свое местоположение. Обратно компьютер посылал информацию, предупреждающую вертолеты о наличии друг друга в воздухе. Затем вертолеты рассчитывали свои траектории таким образом, чтобы избежать столкновения в воздухе – и все это без человеческого вмешательства.
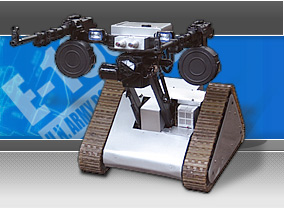
Команда университета переделала 4 радиоуправляемых, работающих на бензине вертолета, каждый из которых весит приблизительно от 58 до 72 кг и длиной 3,6 м. Вертолеты были собраны в Японии в промышленном масштабе для использования, в основном, в качестве самолетов для распыления удобрений на полях. Исследователи снабдили их различным оборудованием, специально разработанным для беспилотных летательных аппаратов.
Например, на каждом вертолете установлено по два бортовых компьютера с операционной системой QNX, предназначенной для вычислений в режиме реального времени. Также разработчики адаптировали системы глобального позиционирования и инерциальной навигации, что помогает стабилизировать вертолеты во время автономных полетов, а также беспроводные модемы и системы Ethernet для обмена информацией.
Для обследования местности впереди себя вертолеты используют лазерные сканеры, один из которых постоянно поворачивается вверх и вниз, чтобы создать трехмерное изображение. Исследователи также сделали большие изменения в системе компьютерного зрения, как часть отдельного контракта с компанией Boeing.
Достижения в сфере технологий создания батарей позволили исследователям из Беркли разработать первый электрический автономный вертолет, работающий на литиево-полимерных батареях – том же типе батарей, который используется в современных мобильных телефонах. Этот вертолет примерно в два раза меньше по размерам вышеописанных вертолетов, работающих на бензине.
Батареи обеспечивают большее количество энергии при меньшем весе, поэтому сейчас они летают лучше и дольше, чем такие же вертолеты, но работающие на бензине. Кроме того, батареи могут быть заменены на станции, вырабатывающие электричество из солнечной энергии, а также их достоинством является возможностью автоматического старта и отключения, в то время как чтобы завести мотор вертолета, работающего на бензине, часто необходимо вмешательство человека.
Разработчики планируют провести еще ряд полевых испытаний, как и электрическими, так и работающими на бензине вертолетами в 2005 году.
gale
PhysOrg.Com