|
Система управления робота
Дистанционное управление
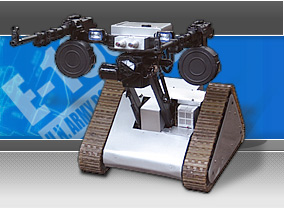
Дистанционное управление может использоваться для управления отдельными системами робота (как, например, управление видеокамерой, установленной на мобильном роботе), а также для управления самим роботом (постановка цели, выбор режима работы и пр.).
Кроме того, часто роботами называют некоторые полностью дистанционно-управляемые устройства, например, «боевые роботы» или «роботы-саперы».
«Рефлексы»
Точно так же, как низшие животные демонстрируют исключительно сложное поведение при отсутствии мозга, роботы могут делать то же, при отсутствии каких-либо вычислительных устройств (особенно ярко эта концепция проявляется в ВЕАМ-роботах).
На «рефлексах» может быть основана и работа отдельных автономных систем роботов: например, автоматическое включение видеозаписи у робота-охранника при срабатывании датчика движения или инициация «оружия» при приближении «противника» у боевого робота.
Микроконтроллеры
Чем хорош контроллер применительно к робототехнике – обладая неплохими вычислительными возможностями, он изначально рассчитан на взаимодействие с «внешним миром», на управление внешними объектами (что, собственно и отличает «контроллер» от «процессора»). Даже самый простой контроллер имеет несколько цифровых линий ввода/вывода, а большинство еще и аналогово-цифровые (АЦП) или цифро-аналоговые (ЦАП) преобразователи, аналоговые компараторы, таймеры/счетчики, генераторы ШИМ и так далее.
Работать с современными контроллерами уже довольно просто. Для многих моделей оказывается достаточно его просто установить на плату и подвести питание.
Разработка программы также идет вполне «цивилизованно»: комфортный SDK, язык высокого уровня (как правило, Си), а программирование микроконтроллеров в большинстве случаев осуществляется непосредственно в схеме.
Для построения системы управления робота средней сложности волне может оказаться достаточно одного микроконтроллера, в более сложных – микроконтроллеры могут управлять отдельными подсвистами.
Персональные компьютеры
Систему управления робота на базе персонального компьютера строят довольно часто, поскольку она знакома и доступна, тем более, что для очень многих «робототехнических» задач было бы вполне достаточно 486 или даже 386 машины.
Такое решение вполне жизнеспособно, однако использовании комплектующих от ПК связано с рядом потенциальных проблем:
• относительно большие габариты.
• сложность сопряжения с объектом: в нашем распоряжении, как правило, только стандартные параллельный и последовательный интерфейсы, и тот и другой потребуют каких-то дополнительных устройств для связи с большинством датчиков и исполнительных устройств.
• сложность организации питания. В некоторых конфигурациях требуются аж четыре напряжения питания.
• Незащищенность по отношению к воздействиям внешней среды (удары, вибрации, пыль, влага и т.д).
Использование более современных комплектов дает возможность задействовать еще и USB, использование других форм-факторов (к примеру, 5.25” или 3.5”) позволяет сделать систему более компактной, а применение ноутбуков отчасти решает проблемы с питанием, но общая ситуация в целом сохраняется.
Промышленные и встраиваемые компьютеры
В промышленных и встраиваемых компьютерах проблемы питания, сопряжения с объектом, защиты от внешних воздействий, как правило, уже решены.
|
|