|
 |
***
|
 |
25.11.2005 - Шестиногий шагающий робот L.E.S.L.I. 610-16 "Паук" |
 |
|
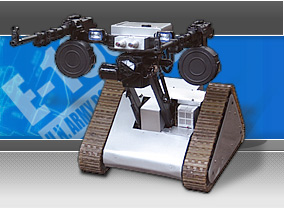
Шестиногий шагающий робот L.E.S.L.I. 610-16 "Паук" |
Первоначально, робот L.E.S.L.I. 610-16 или просто "Паук" проектировался с той же целью, что и L.E.S.L.I. 210-Х "Бройлер".
Первоначально, робот L.E.S.L.I. 610-16 или просто "Паук" проектировался с той же целью, что и L.E.S.L.I. 210-Х "Бройлер". На нем предполагалось проверить узлы и системы проектов L.E.S.L.I. 650-12 «ПТШМС» и L.E.S.L.I. 610-13 "Пожарный робот". Их главное сходство в том, что перед началом активизации аппараты находятся в сложенном состоянии. Первоначально на «Пауке» было смонтировано четыре резервуара-контейнера для пламяподавляющего состава либо (при использовании в качестве охранника) для газа CS, но пришлось довести их количество до шести. Емкости с составом или CS вставлялись в алюминиевые контейнеры, зажимались, в результате чего они включались в единую систему. По радиокоманде клапан открывался, и содержимое выпускалось в окружающую среду.
Конструкция ходовой части была разработана с использованием традиционных концепций. Использование привода от одного двигателя позволило бы улучшить характеристики, но тогда этот привод еще не был сконструирован.
Никаких других видов управления, кроме радиоуправления "Паук" не имел. Аналогичная система управления у L.E.S.L.I. 650-18 "Терминатор".
"Паук" устанавливается на поверхность, после чего дистанционно активизируется. После активизации раскладывается в рабочее состояние и подчиняясь радиокомандам осуществляет перемещение и постановку газовой завесы.
Виды использования шасси проектов 650-12, 610-13 и 610-16 могут быть, в зависимости от сменного навесного оборудования, весьма различными.
Технические данные робота:
Диаметр в активизированном состоянии - 740мм; высота в активизированном состоянии (без антенны) - 445мм; количество конечностей - 6; система балансировки - статическая устойчивость; управление - по радио; силовая установка - 12 электродвигателей; питание - аккумуляторная батарея
|
 |
 |
| Автор конструкции: Камоцкий Сергей Станиславович |
| Камоцкий С.С. |
|
| Стас |
[email protected] |
| Очень интересно, что за алгоритмы управления ходббой, где это все делалось. Сам давно занимаюсь шагающими роботами. |
| | boodiak |
[email protected] |
| как насчет бегающего двуногого робота поможеш? хотяб тория |
| | стас |
[email protected] |
| Что за бегающий, где это все делается, вообще, интересны подробности. Лучше, наверное, по почте. |
| | вован |
[email protected] |
| очень интересная конструкция.
хотелось бы тоже такой сделать, но увы работа времени нету и прочее.
материалов не найдешь наверное
как каркас делался? |
| | Roman |
[email protected] |
| как вы делаете суставы? |
| | ROMAN |
[email protected] |
| СЛЫШ А КАК ВЫ ИХ ТАКИМИ КРАСИВЫМИ ДЕЛАЕТЕ |
| | MAXim |
|
| А на каком контролере делал? |
| | афоня |
[email protected] |
| найди меня на почте,и я придложу тебе новое направление в проектировании рототов,точнее новую идею из какого материала его можно строить,и другие не электронные источники питания силовой системы. |
| | Profiler |
[email protected] |
| Вообще я так думаю что там все движения работают на дросселях |
|
|
|
 |
|
 |
 |
|
 |
|